Servo là gi?
- 09/03/2018
- 622
- 0
- Hệ thống servo là gì?
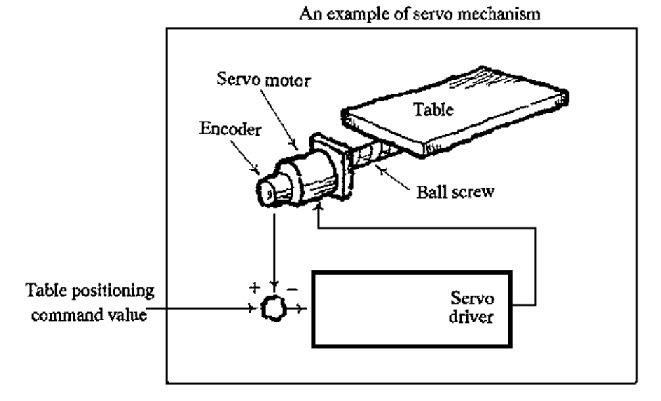
Servo bắt nguồn từ tiếng Hy Lạp là Servus (servant), nghĩa là nô lệ, đày tớ vân vân và vân vân. Một hệ thống được gọi là servo khi hệ thống đó chấp hành một cách chính xác mệnh lệnh của chủ nhân (tức là người điều khiển). Điều này là dĩ nhiên rồi, nô lệ mà không nghe lời chủ nhân thì có nước đi bán muối. Hệ thống servo là hệ thống điều khiển các thiết bị cơ học với các biến là biến vị trí và tốc độ (giá trị đặt và giá trị thực). Sau đây là một ví dụ minh họa.
2. Cơ cấu định vị:
Hệ thống servo không đơn giản chỉ là một phương pháp thay thế điều khiển vị trí và tốc độ của các cơ cấu cơ học, ngoài những thiết bị cơ khí đơn giản, hệ thống servo bây giờ đã trở thành một hệ thống điều khiển chính trong phương pháp điều khiển vị trí và tốc độ. Sau đây là một số ví dụ về các cơ cấu định vị:
a. Cơ cấu định vị đơn giản :
Các vị dụ về cơ cấu này đó là xy lanh hay trục cam hay bộ ly hợp và phanh hãm
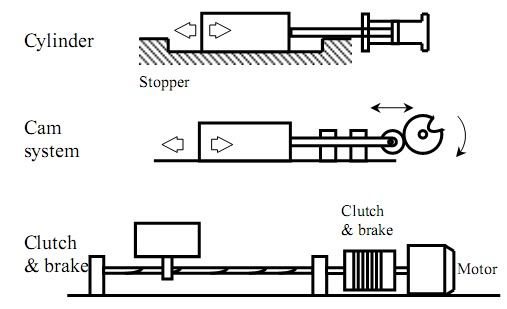
Ưu điểm của cơ cấu này đó là đơn giản, rẻ tiền, và có thể hoạt động ở tốc độ cao.
b. Cơ cấu định vị linh hoạt điều khiển bởi servo motor
Cơ cấu này có thể được điều khiển vòng hở, nửa kín hay vòng kín
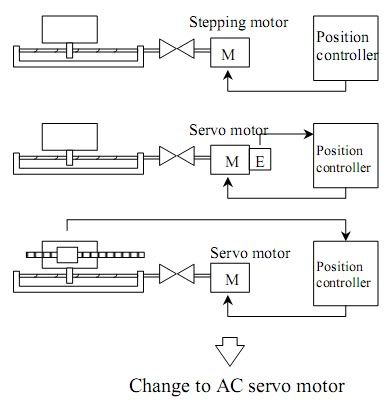
Ưu điểm của cơ cấu này đó là độ chính xác và đáp ứng tốc độ cao, có thể dễ dàng thay đổi vị trí đich và tốc độ của cơ cấu chấp hành.
c. Cơ cấu chuyển động định hướng
Cơ cấu này chuyển động theo hướng nhất định được chỉ định từ bộ điều khiển. Chuyển động có thể là chuyển động tịnh tiến hay quay.
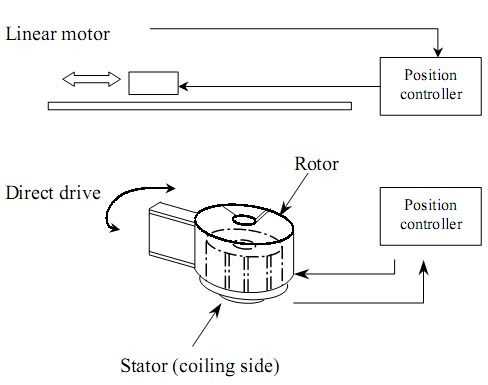
Ưu điểm là cơ cấu chấp hành đơn giản và nâng cao tuổi thọ hộp số truyền động (do truyền động khá êm).
3. Backlash và hiệu chỉnh:
Backlash hiểu nôm na đó là giới hạn chuyển động của một hệ thống servo.Tất cả các thiết bị cơ khí đều có một điểm trung tính giữa chuyển động hoặc quay theo chiều dương và âm (cũng giống như động cơ trước khi đảo chiều thì vận tốc phải giảm về 0). Xet một chuyển động tịnh tiến lui và tới như trong hình sau:
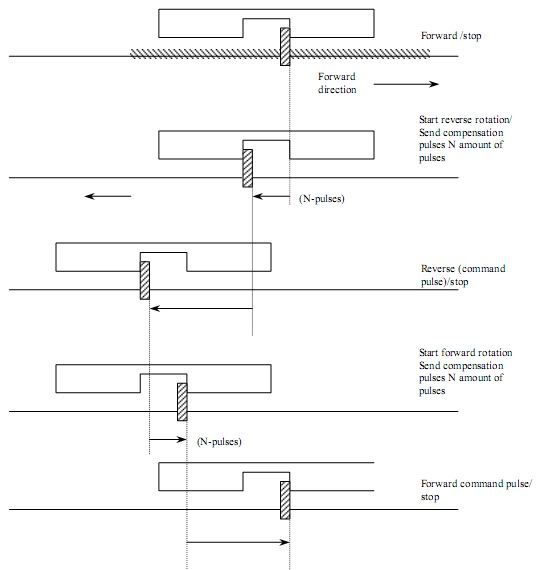
Chuyển động tính tiến này được điều khiển bởi một động cơ servo. Chuyển động tới và lui được giới hạn bởi một khoản trống như trong hình. Như vậy động cơ sẽ quay theo chiều dương hoặc chiều âm theo một số vòng nhất định để chuyển động của thanh quét lên toàn bộ khoản trống đó nhưng không được vượt quá khoản trống (đây là một trong những điều kiện cốt lõi của việc điều khiển động cơ servo). Giới hạn này được gọi là backlash, từ nay hễ gặp từ backlash thì chắc các bạn đã hiểu nó là cái gì rồi đúng không. Tuy nhiên trong thực tế độ động cơ quay những vòng chính xác để con trượt trựơt chính xác và quét lên toàn bộ khoản trống trên là rất khó thực hiện nếu không có một sự bù trừ cho nó. Và trong hệ thống servo nhất thiết có những hàm lệnh thực hiện việc bù trừ, hiệu chỉnh này. Như trong hình vẽ trên, hệ thống servo gởi xung lệnh hiệu chỉnh cộng/trừ số lượng xung lệnh điều khiển và các xung lệnh hiệu chỉnh này sẽ không được tính đến trong bộ đếm xung.
Tùy vào hệ thống và tùy túi tiền cũng như ý đồ của người thiết kế mà 1 trong 3 hoặc kết hợp cả 3 loại điều khiển trên vào hệ thống. Sau đây là một ví dụ sơ đồ khối điều khiển động cơ servo với 2 vòng hồi tiếp vị trí và tốc độ
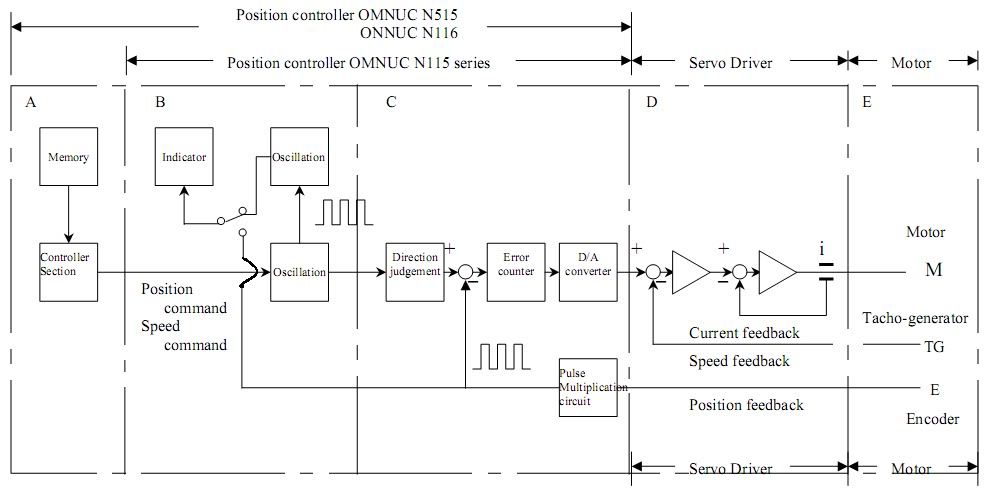
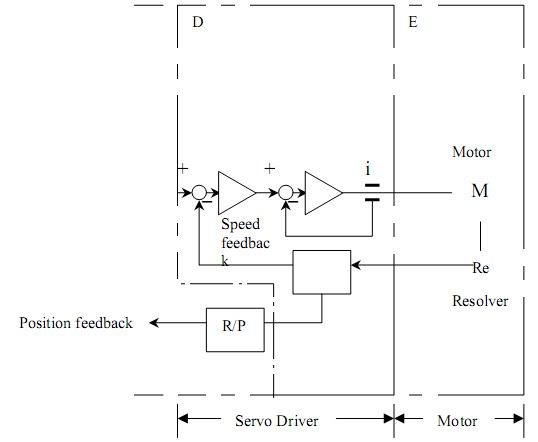
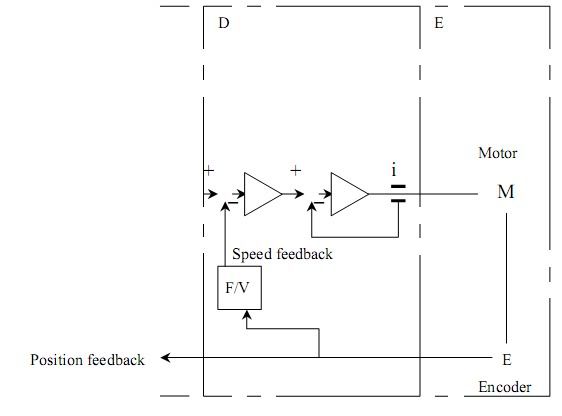
Trong đó phần A B C là phần so sánh xử lý tín hiệu hồi tiếp và hiệu chỉnh lệnh. Phần D E là cơ cấu thực thi và hồi tiếp. Các phần A B C thì khá phổ dụng trong các sơ đồ khối điều khiển, phần D E thì tùy các thiết bị sử dụng mà chúng có khác nhau đôi chút nhưng về bản chất chúng hoàn toàn giống nhau. Sau đây là một số ví dụ về phần D E thường gặp.
hoặc
(tổng hợp)
Ý kiến bạn đọc
DANH MỤC SẢN PHẨM
Sản phẩm bán chạy





Tin tức mới




Thống kê truy cập
- Đang truy cập2
- Hôm nay130
- Tháng hiện tại9,128
- Tổng lượt truy cập350,478